概述
Visdom:一个灵活的可视化工具,可用来对于 实时,富数据的 创建,组织和共享。支持Torch和Numpy还有pytorch。
visdom
可以实现远程数据的可视化,对科学实验有很大帮助。我们可以远程的发送图片和数据,并进行在ui界面显示出来,检查实验结果,或者debug.要用这个先要安装,对于python模块而言,安装都是蛮简单的:
pip install visdom安装完每次要用直接输入代码打开:
python -m visdom.server然后根据提示在浏览器中输入相应地址即可,默认地址为:
http://localhost:8097/使用示例
1. vis.text(), vis.image()
import visdom # 添加visdom库 import numpy as np # 添加numpy库 vis = visdom.Visdom(env='test') # 设置环境窗口的名称,如果不设置名称就默认为main vis.text('test', win='main') # 使用文本输出 vis.image(np.ones((3, 100, 100))) # 绘制一幅尺寸为3 * 100 * 100的图片,图片的像素值全部为1其中:
visdom.Visdom(env=‘命名新环境')
vis.text(‘文本', win=‘环境名')
vis.image(‘图片',win=‘环境名')
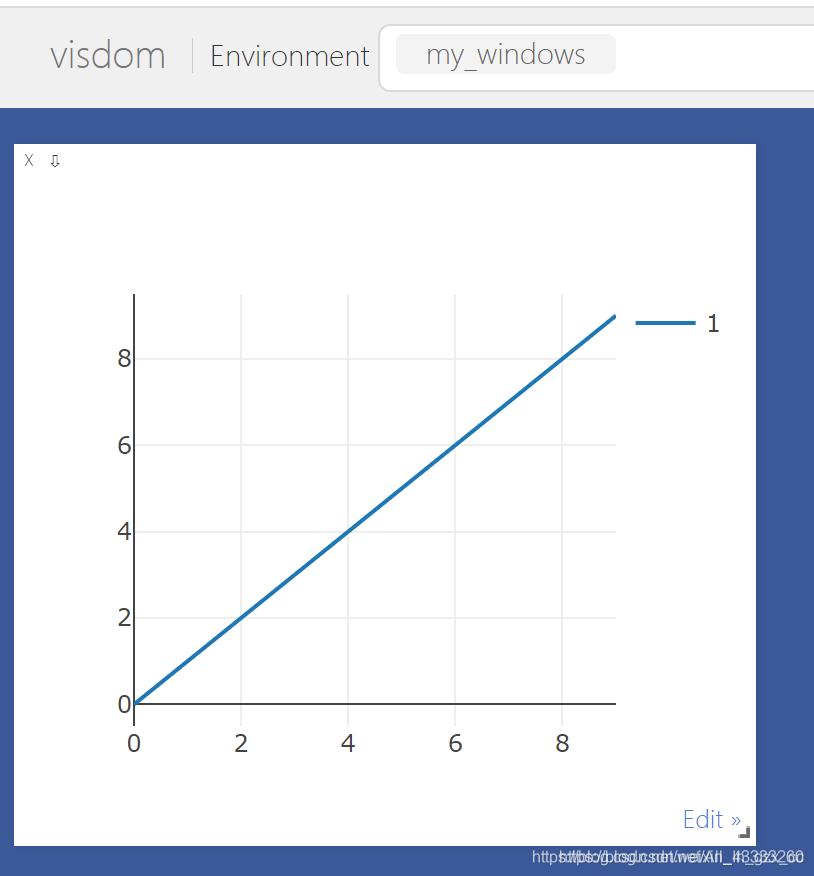
2. 画直线 .line() 一条
import visdom import numpy as np vis = visdom.Visdom(env='my_windows') # 设置环境窗口的名称,如果不设置名称就默认为main x = list(range(10)) y = list(range(10)) # 使用line函数绘制直线 并选择显示坐标轴 vis.line(X=np.array(x), Y=np.array(y), opts=dict(showlegend=True))vis.line([x], [y], opts=dict(showlegend=True)[展示说明])
两条
import visdom import numpy as np vis = visdom.Visdom(env='my_windows') x = list(range(10)) y = list(range(10)) z = list(range(1,11)) vis.line(X=np.array(x), Y=np.column_stack((np.array(y), np.array(z))), opts=dict(showlegend=True))vis.line([x], [y=np.column_stack((np.array(y),np.array(z),np.array(还可以增加)))])
np.column_stack(a,b), 表示两个矩阵按列合并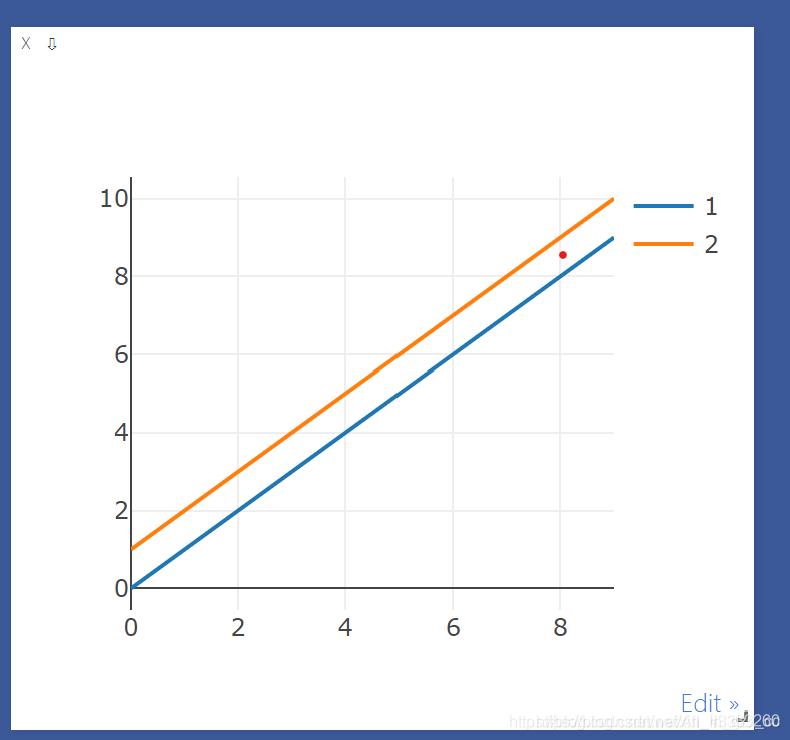
sin(x)曲线
import visdom import torch vis = visdom.Visdom(env='sin') x = torch.arange(0, 100, 0.1) y = torch.sin(x) vis.line(X=x,Y=y,win='sin(x)',opts=dict(showlegend=True))
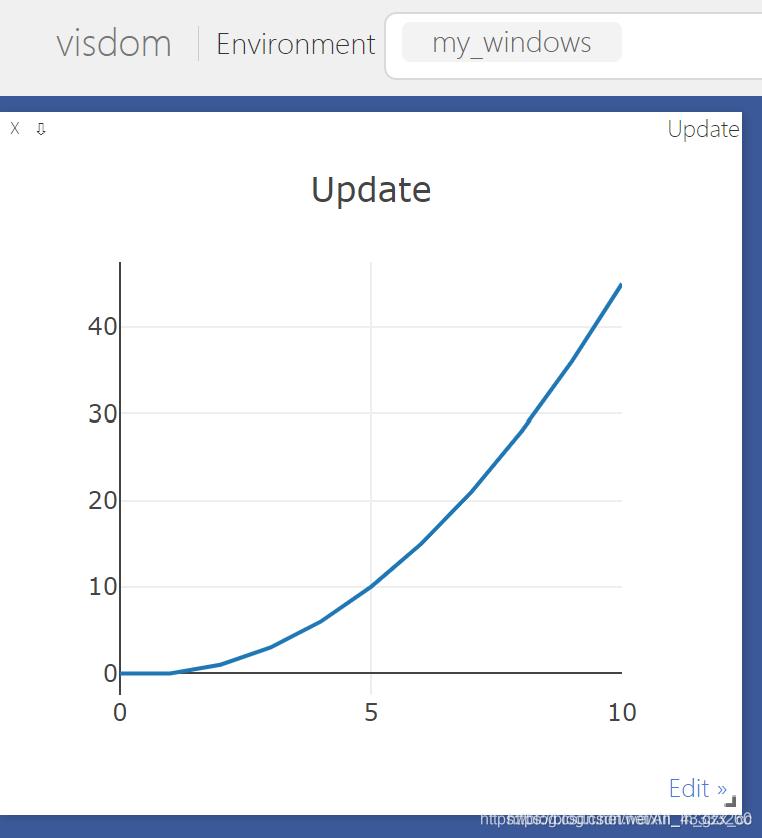
持续更新图表
import visdom import numpy as np vis = visdom.Visdom(env='my_windows') # 利用update更新图像 x = 0 y = 0 my_win = vis.line(X=np.array([x]), Y=np.array([y]), opts=dict(title='Update')) for i in range(10): x += 1 y += i vis.line(X=np.array([x]), Y=np.array([y]), win=my_win, update='append')使用“append”追加数据,“replace”使用新数据,“remove”用于删除“name”中指定的跟踪。
vis.images()
import visdom import torch # 新建一个连接客户端 # 指定env = 'test1',默认是'main',注意在浏览器界面做环境的切换 vis = visdom.Visdom(env='test1') # 绘制正弦函数 x = torch.arange(1, 100, 0.01) y = torch.sin(x) vis.line(X=x,Y=y, win='sinx',opts={'title':'y=sin(x)'}) # 绘制36张图片随机的彩色图片 vis.images(torch.randn(36,3,64,64).numpy(),nrow=6, win='imgs',opts={'title':'imgs'})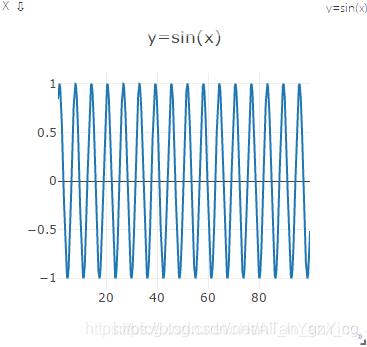
绘制loss函数的变化趋势
#绘制loss变化趋势,参数一为Y轴的值,参数二为X轴的值,参数三为窗体名称,参数四为表格名称,参数五为更新选项,从第二个点开始可以更新 vis.line(Y=np.array([totalloss.item()]), X=np.array([traintime]), win=('train_loss'), opts=dict(title='train_loss'), update=None if traintime == 0 else 'append' )对于Visdom更详细的代码示例详见 链接1
更多介绍详见 链接2
实际代码
此代码出自CycleGAN的 utils.py 里一个实现
# 记录训练日志,显示生成图,画loss曲线 的类 class Logger(): def __init__(self, n_epochs, batches_epoch): ''' :param n_epochs: 跑多少个epochs :param batches_epoch: 一个epoch有几个batches ''' self.viz = Visdom() # 默认env是main函数 self.n_epochs = n_epochs self.batches_epoch = batches_epoch self.epoch = 1 # 当前epoch数 self.batch = 1 # 当前batch数 self.prev_time = time.time() self.mean_period = 0 self.losses = {} self.loss_windows = {} # 保存loss图的字典集合 self.image_windows = {} # 保存生成图的字典集合 def log(self, losses=None, images=None): self.mean_period += (time.time() - self.prev_time) self.prev_time = time.time() sys.stdout.write('\rEpoch %03d/%03d [%04d/%04d] -- ' % (self.epoch, self.n_epochs, self.batch, self.batches_epoch)) for i, loss_name in enumerate(losses.keys()): if loss_name not in self.losses: self.losses[loss_name] = losses[loss_name].data.item() #这里losses[loss_name].data是个tensor(包在值外面的数据结构),要用item方法取值 else: self.losses[loss_name] = losses[loss_name].data.item() if (i + 1) == len(losses.keys()): sys.stdout.write('%s: %.4f -- ' % (loss_name, self.losses[loss_name]/self.batch)) else: sys.stdout.write('%s: %.4f | ' % (loss_name, self.losses[loss_name]/self.batch)) batches_done = self.batches_epoch * (self.epoch - 1) + self.batch batches_left = self.batches_epoch * (self.n_epochs - self.epoch) + self.batches_epoch - self.batch sys.stdout.write('ETA: %s' % (datetime.timedelta(seconds=batches_left*self.mean_period/batches_done))) # 显示生成图 for image_name, tensor in images.items(): # 字典.items()是以list形式返回键值对 if image_name not in self.image_windows: self.image_windows[image_name] = self.viz.image(tensor2image(tensor.data), opts={'title':image_name}) else: self.viz.image(tensor2image(tensor.data), win=self.image_windows[image_name], opts={'title':image_name}) # End of each epoch if (self.batch % self.batches_epoch) == 0: # 一个epoch结束时 # 绘制loss曲线图 for loss_name, loss in self.losses.items(): if loss_name not in self.loss_windows: self.loss_windows[loss_name] = self.viz.line(X=np.array([self.epoch]), Y=np.array([loss/self.batch]), opts={'xlabel':'epochs', 'ylabel':loss_name, 'title':loss_name}) else: self.viz.line(X=np.array([self.epoch]), Y=np.array([loss/self.batch]), win=self.loss_windows[loss_name], update='append') #update='append'可以使loss图不断更新 # 每个epoch重置一次loss self.losses[loss_name] = 0.0 # 跑完一个epoch,更新一下下面参数 self.epoch += 1 self.batch = 1 sys.stdout.write('\n') else: self.batch += 1train.py中调用代码是
# 绘画Loss图 logger = Logger(opt.n_epochs, len(dataloader)) for epoch in range(opt.epoch, opt.n_epochs): for i, batch in enumerate(dataloader): ...... # 记录训练日志 # Progress report (http://localhost:8097) 显示visdom画图的网址 logger.log({'loss_G': loss_G, 'loss_G_identity': (loss_identity_A + loss_identity_B), 'loss_G_GAN': (loss_GAN_A2B + loss_GAN_B2A), 'loss_G_cycle': (loss_cycle_ABA + loss_cycle_BAB), 'loss_D': (loss_D_A + loss_D_B)}, images={'real_A': real_A, 'real_B': real_B, 'fake_A': fake_A, 'fake_B': fake_B})
到此这篇关于python第三方库visdom的使用入门教程的文章就介绍到这了,更多相关python visdom使用内容请搜索python博客以前的文章或继续浏览下面的相关文章希望大家以后多多支持python博客!
-
<< 上一篇 下一篇 >>
标签:numpy
python第三方库visdom的使用入门教程
看: 1560次 时间:2021-06-30 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!