克里金法时一种用于空间插值的地学统计方法。
克里金法用半变异测定空间要素,要素即自相关要素。
半变异公式为:
其中γ(h) 是已知点 xi 和 xj 的半变异,***h***表示这两个点之间的距离,z是属性值。
假设不存在漂移,普通克里金法重点考虑空间相关因素,并用拟合的半变异直接进行插值。
估算某测量点z值的通用方程为:
式中,z0是待估计值,zx是已知点x的值,Wx是每个已知点关联的权重,s是用于估计的已知点数目。
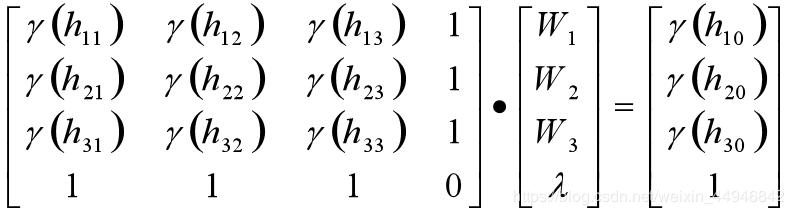
权重可以由一组矩阵方程得到。

此程序对半变异进行拟合时采用的时最简单的正比例函数拟合
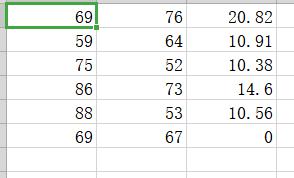
数据为csv格式
保存格式如下:
第一行为第一个点以此类推
最后一行是待求点坐标,其中z为未知值,暂且假设为0
代码如下:
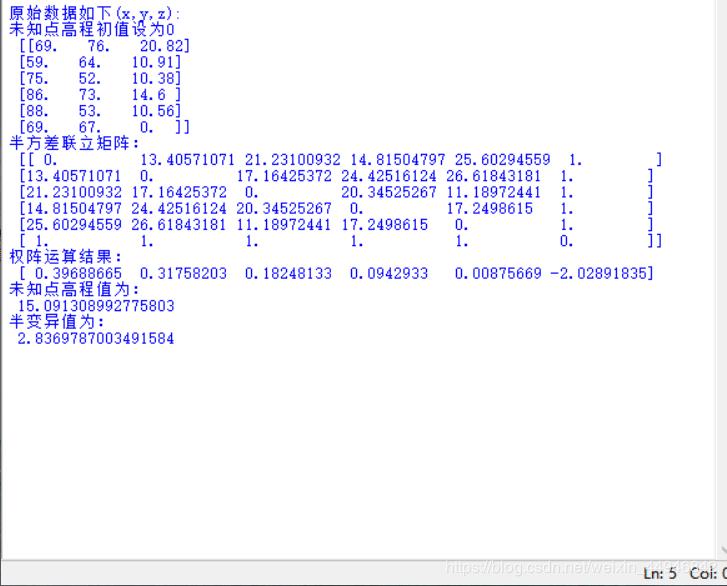
import numpy as np from math import* from numpy.linalg import * h_data=np.loadtxt(open('高程点数据.csv'),delimiter=",",skiprows=0) print('原始数据如下(x,y,z):\n未知点高程初值设为0\n',h_data) def dis(p1,p2): a=pow((pow((p1[0]-p2[0]),2)+pow((p1[1]-p2[1]),2)),0.5) return a def rh(z1,z2): r=1/2*pow((z1[2]-z2[2]),2) return r def proportional(x,y): xx,xy=0,0 for i in range(len(x)): xx+=pow(x[i],2) xy+=x[i]*y[i] k=xy/xx return k r=[];pp=[];p=[]; for i in range(len(h_data)): pp.append(h_data[i]) for i in range(len(pp)): for j in range(len(pp)): p.append(dis(pp[i],pp[j])) r.append(rh(pp[i],pp[j])) r=np.array(r).reshape(len(h_data),len(h_data)) r=np.delete(r,len(h_data)-1,axis =0) r=np.delete(r,len(h_data)-1,axis =1) h=np.array(p).reshape(len(h_data),len(h_data)) h=np.delete(h,len(h_data)-1,axis =0) oh=h[:,len(h_data)-1] h=np.delete(h,len(h_data)-1,axis =1) hh=np.triu(h,0) rr=np.triu(r,0) r0=[];h0=[]; for i in range(len(h_data)-1): for j in range(len(h_data)-1): if hh[i][j] !=0: a=h[i][j] h0.append(a) if rr[i][j] !=0: a=rr[i][j] r0.append(a) k=proportional(h0,r0) hnew=h*k a2=np.ones((1,len(h_data)-1)) a1=np.ones((len(h_data)-1,1)) a1=np.r_[a1,[[0]]] hnew=np.r_[hnew,a2] hnew=np.c_[hnew,a1] print('半方差联立矩阵:\n',hnew) oh=np.array(k*oh) oh=np.r_[oh,[1]] w=np.dot(inv(hnew),oh) print('权阵运算结果:\n',w) z0,s2=0,0 for i in range(len(h_data)-1): z0=w[i]*h_data[i][2]+z0 s2=w[i]*oh[i]+s2 s2=s2+w[len(h_data)-1] print('未知点高程值为:\n',z0) print('半变异值为:\n',pow(s2,0.5)) input()运算结果
python初学,为了完成作业写了个小程序来帮助计算,因为初学知识有限,有很多地方写的很复杂,可以优化的地方很多。 还望读者谅解,欢迎斧正谢谢!
参考文献:
【1】(美)张康聪 著;陈健飞等译. 地理信息系统导论(第三版). 北京:清华大学出版社, 2009.04.以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持python博客。
-
<< 上一篇 下一篇 >>
标签:numpy
python 普通克里金(Kriging)法的实现
看: 1488次 时间:2021-01-06 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!