人类很早就注意到飞蛾扑火这一奇怪的现象,并且自作主张地赋予了飞蛾扑火很多含义,引申出为了理想和追求义无反顾、不畏牺牲的精神。但是,这种引申和比喻,征求过飞蛾的意见吗?
后来,生物学家又提出来昆虫趋光性这一假说来解释飞蛾扑火。不过,这个假说似乎也不成立。如果昆虫真的追逐光明,估计地球上早就没有昆虫了——它们应该齐刷刷整体移民到太阳或月亮上去了。
仔细观察飞蛾扑火,就会发现,昆虫们并不是笔直地飞向光源,而是绕着光源飞行,同时越来越接近光源,最终酿成了“惨案”。这一行为被解释成“失误”似乎更合理一点。既然火烛危险,那么飞蛾为什么要绕着火烛飞行呢?
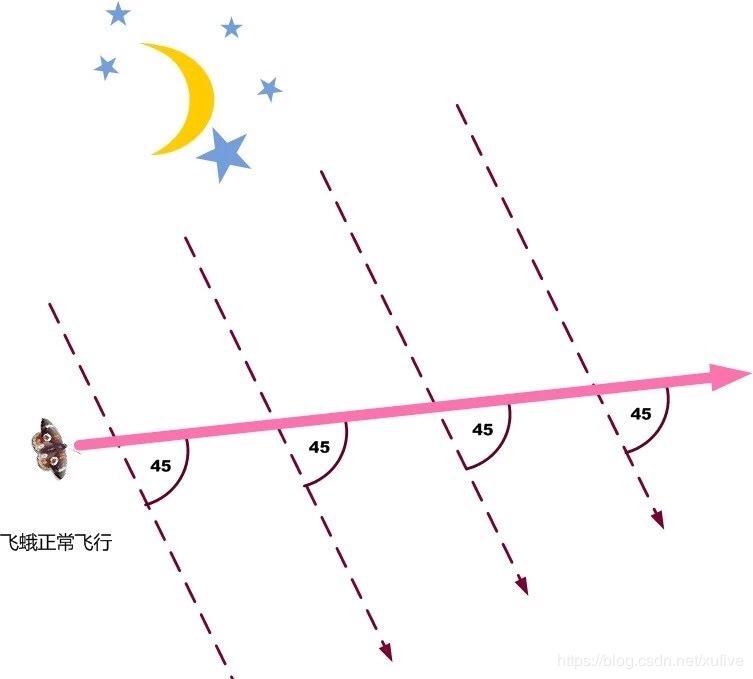
最新的解释是,飞蛾在夜晚飞行时是依据月光和星光作为参照物进行导航的。星星和月亮离我们非常远,光到了地面上可以看成平行光,当飞蛾的飞行路径保持与光线方向成恒定夹角时,飞蛾就变成了直线飞行,如下图所示。
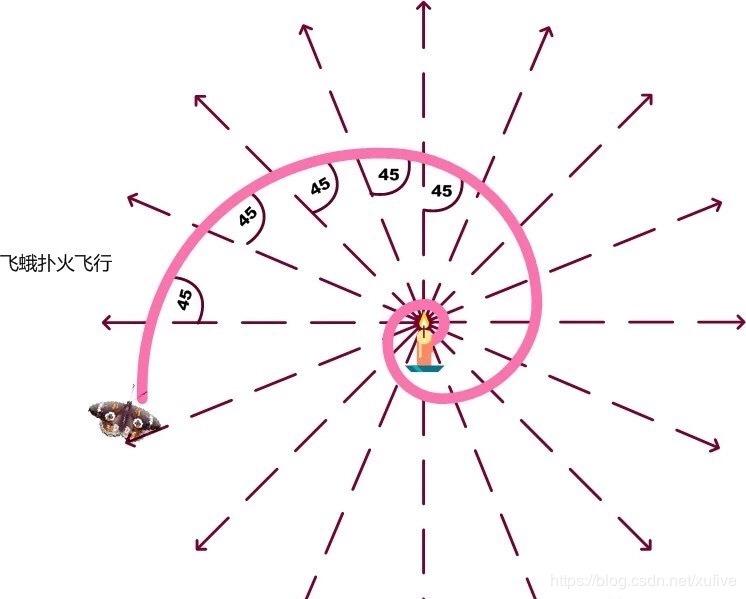
然而,当飞蛾遇到了火烛等危险光源时,还是按照以前的飞行方式,路径保持与光线方向成恒定夹角,以为依旧能飞成一条直线,结果悲剧了。此时它的飞行轨迹并不是一条直线,而是一条等角螺旋线,如下图所示。
可怜的飞蛾!亿万年进化出来的精准导航,在人工光源的干扰下竟如此不堪。
螺线及等角螺线
螺线家族很庞大,比如,阿基米德螺线、费马螺线、等角螺线、双曲螺线、连锁螺线、斐波那契螺线、欧拉螺线等等。等角螺线,又叫对数螺线,螺线家族的一员。
早在2000多年以前,古希腊数学家阿基米德就对螺旋线进行了研究。公元1638年,著名数学家笛卡尔首先描述了对数螺旋线(等角螺旋线),并列出了螺旋线的解析式。这种螺旋线有很多特点,其中最突出的一点就是它的形状,无论你把它放大或缩小它都不会有任何的改变。就像我们不能把角放大或缩小一样。
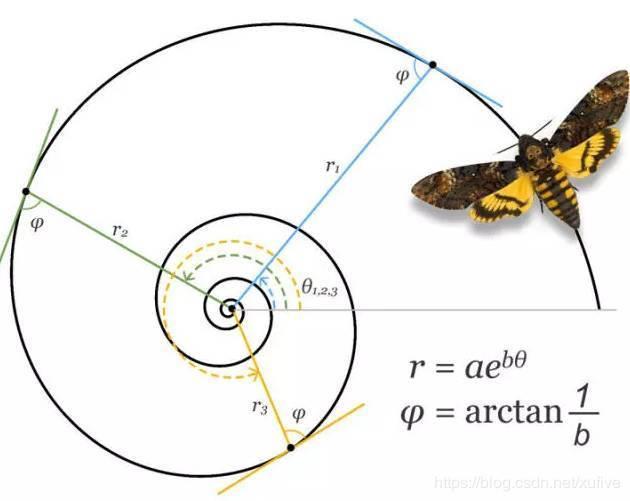
用极坐标分析法分析飞蛾扑火的飞行轨迹,可知,轨迹线上任意一点的切线与该点与原点的连线之间的夹角是固定的,这就是等角螺线得名的由来。因为分析过程使用了对数,所以等角螺线又叫对数螺线。我不太会用LaTeX写数学公式,所以就用 python 的方法写出螺线方程。其中,fixed 表示螺线固定角,大于 pi/2 则为顺时针螺线,小于 pi/2 则为逆时针螺线。theta 表示旋转弧度,r 表示距离中心点距离。
r = fixed*np.exp(theta/np.tan(fixed))等角螺线在生活中也经常见到,比如,鹦鹉螺的花纹、玫瑰花瓣的排列,星系的悬臂,低气压云图等。

绘制等角螺线
给定中心点和固定角,一个等角螺线就被唯一地确定了。这个螺线可以绕很多圈,可以填满整个宇宙。但很多时候,我们往往只需要观察螺线上的一小部分,这时候就需要两个参数来约定:一个叫作 circle,表示你希望看到多少圈螺线,一个叫作 phase,表示螺线的可见部分向内(顺时针)或向外(逆时针螺线)旋转多少圈。
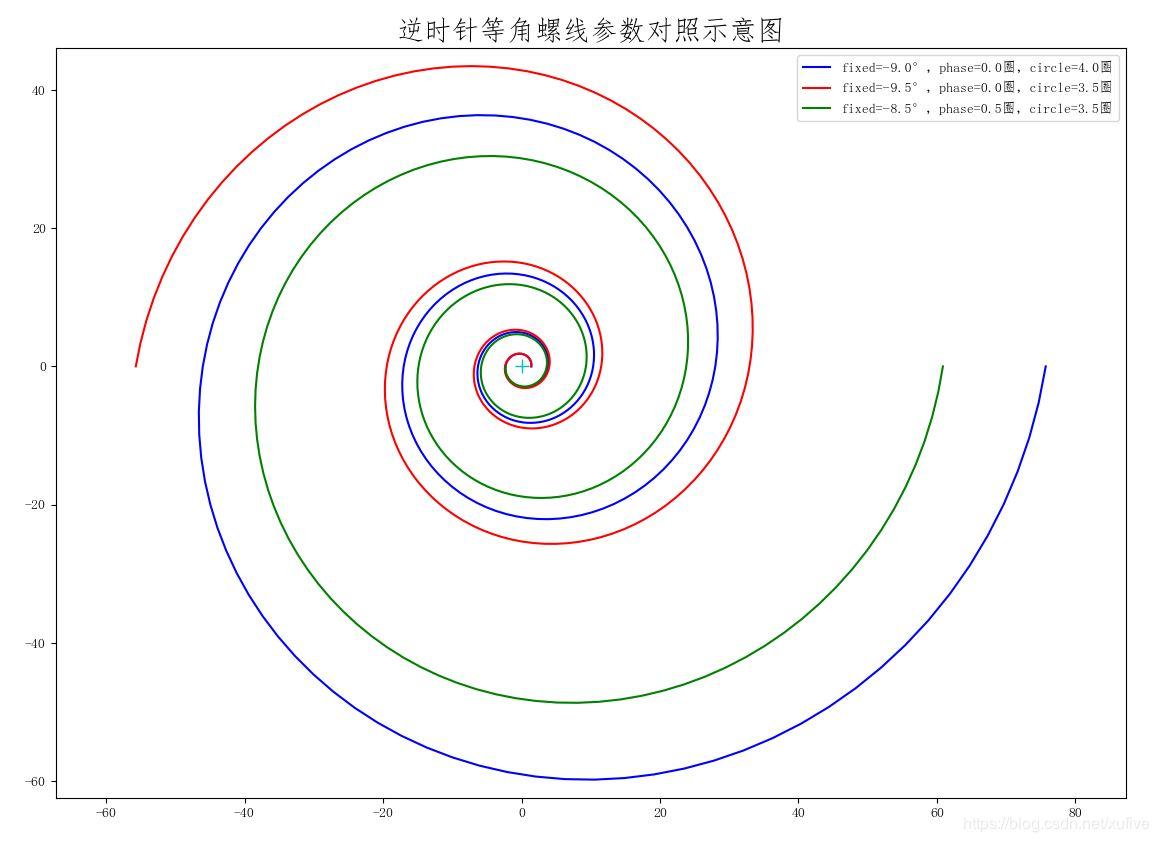
这是使用 matplotlib 绘制等角螺线的函数,其中固定角参数 fixed 做了一点处理:以度(°)为单位,以零为中心,大于零则为顺时针螺线,小于零则为逆时针螺线
import numpy as np import matplotlib.pyplot as plt from pylab import mpl mpl.rcParams['font.sans-serif'] = ['FangSong'] mpl.rcParams['axes.unicode_minus'] = False def plotSpiral(core, fixed, phase=0, circle=4): """绘制等角螺线 core- 等角螺线的中心坐标,tuple类型 fixed - 等角螺线的固定角度,单位:度(°)。fixed大于零则为顺时针螺线,小于零则为逆时针螺线 phase - 初始相位,单位:圈(360°)。对顺时针螺线,该数值越大,螺线越大,对逆时针螺线则相反 circle - 螺线可见部分的圈数,单位:圈(360°) """ plt.axis("equal") plt.plot([core[0]], [core[1]], c='red', marker='+', markersize=10) fixed_rad = np.radians(90 + fixed) theta = np.linspace(0, circle*2*np.pi, 361) + phase*2*np.pi r = fixed_rad*np.exp(theta/np.tan(fixed_rad)) x = r*np.cos(theta) + core[0] y = r*np.sin(theta) - core[1] plt.plot(x, y, c='blue') plt.show()下图展示了逆时针等角螺线各个参数的意义:
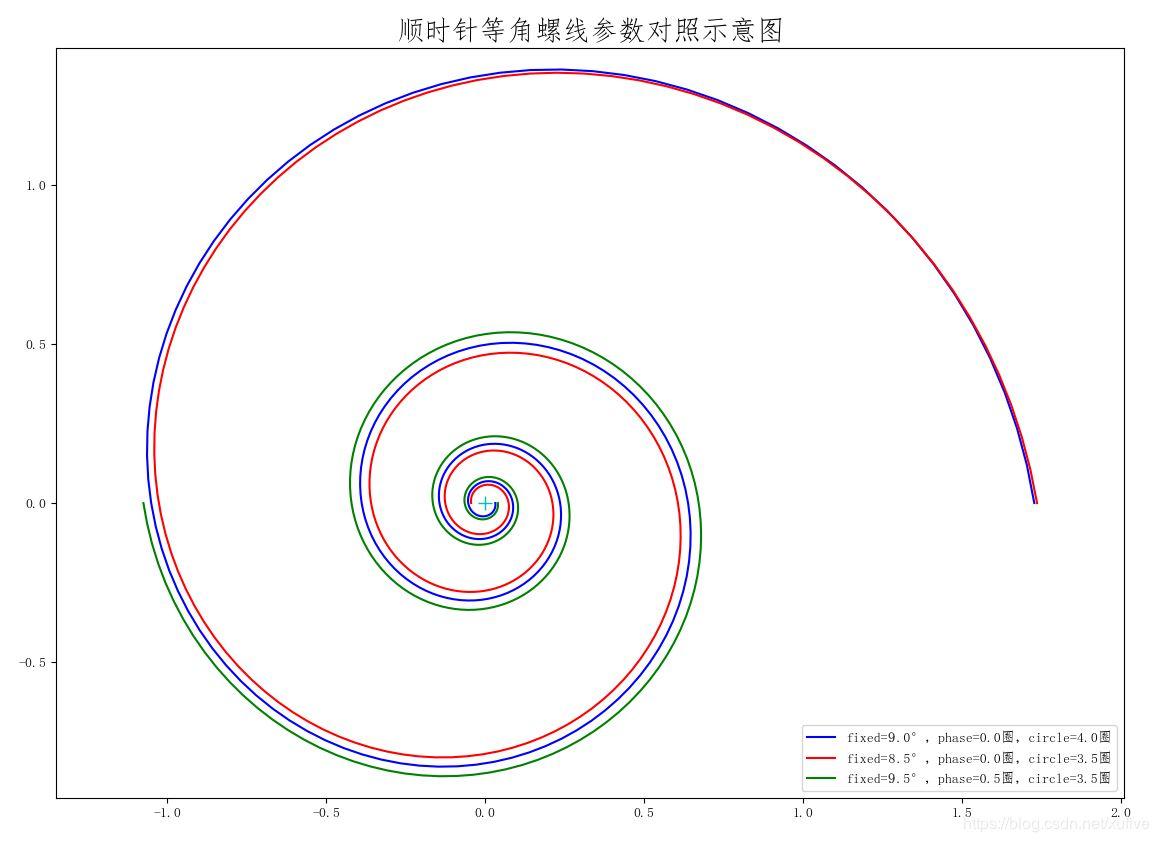
下图展示了顺时针等角螺线各个参数的意义:
拟合等角螺线
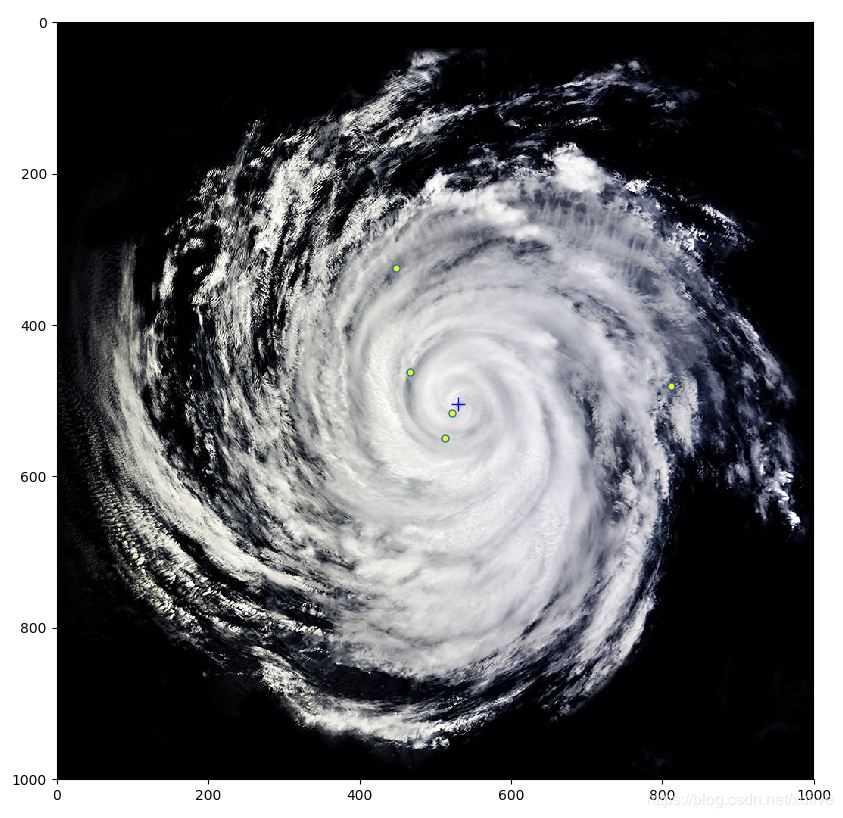
在台风定位时,需要手动确定台风中心位置,并标识出台风螺线轨迹上的部分点,然后逆合出螺线方程。如下图所示,蓝色十字为台风中心点,5个黄色圆点是手工标注的台风螺线轨迹上的点。
以下为拟合函数
import numpy as np from scipy import optimize def fit_spiral(core, dots): """拟合等角螺线,返回定角fixed,初始相位phase""" fixed_ccw = 0.445*np.pi fixed_cw = 0.555*np.pi # 将dots拆分成x_list和y_list x_list, y_list = list(), list() for x, y in dots: x_list.append(x-core[0]) y_list.append(y-core[1]) # 计算距离 x = np.array(x_list) y = np.array(y_list) r = np.hypot(x,y) # 按照距离排序 sort_mask = np.argsort(r) x = x[sort_mask] y = y[sort_mask] r = r[sort_mask] # 计算角度 theta = np.arctan(y/x) theta[x<0] += np.pi # 确定顺序(CW-顺时针,CCW-逆时针) d = np.diff(theta) print(d) ccw = d[d>0].size > d[d<0].size print('ccw=',ccw) # 调整角度为升序(CCW)或降序(CW) if ccw: for i in range(1, theta.size): while theta[i] < theta[i-1]: theta[i] += 2*np.pi dtheta = theta[i] - theta[i-1] while r[i]/r[i-1] > 1.8*np.exp(dtheta/np.tan(fixed_ccw)): theta[i] += 2*np.pi dtheta = theta[i] - theta[i-1] else: for i in range(theta.size-1)[::-1]: while theta[i] < theta[i+1]: theta[i] += 2*np.pi dtheta = theta[i+1] - theta[i] while r[i+1]/r[i] > 1.8*np.exp(dtheta/np.tan(fixed_cw)): theta[i] += 2*np.pi dtheta = theta[i+1] - theta[i] # 定义拟合函数 def fmax(theta, fixed, phase): fixed = np.radians(90 + fixed) return fixed*np.exp((theta+phase*2*np.pi)/np.tan(fixed)) try: fita, fitb = optimize.curve_fit(fmax, theta, r, [2-int(ccw), 0], maxfev=10000) return fita except: return None core = (530, 496) dots = [(467,538), (448,675), (522,484), (513,451), (811,519)] result = fit_spiral(core, dots) if isinstance(result, np.ndarray): plotSpiral(core, result[0], phase=result[1], circle=4) else: print(u'拟合失败')拟合效果如下图:
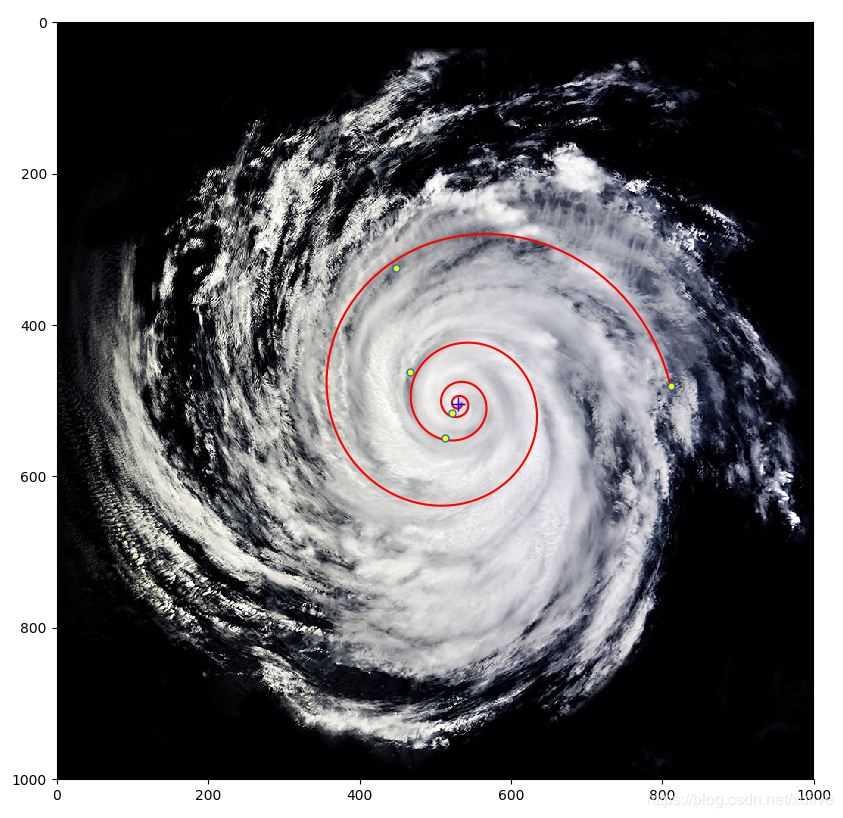
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持python博客。
-
<< 上一篇 下一篇 >>
标签:numpy matplotlib
用python拟合等角螺线的实现示例
看: 1703次 时间:2020-12-25 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!