卷积在pytorch中有两种实现,一种是torch.nn.Conv2d(),一种是torch.nn.functional.conv2d(),这两种方式本质都是执行卷积操作,对输入的要求也是一样的,首先需要输入的是一个torch.autograd.Variable()的类型,大小是(batch,channel, H,W),其中batch表示输入的一批数据的数目,channel表示输入的通道数。
一般一张彩色的图片是3,灰度图片是1,而卷积网络过程中的通道数比较大,会出现几十到几百的通道数。H和W表示输入图片的高度和宽度,比如一个batch是32张图片,每张图片是3通道,高和宽分别是50和100,那么输入的大小就是(32,3,50,100)。
如下代码是卷积执行soble边缘检测算子的实现:
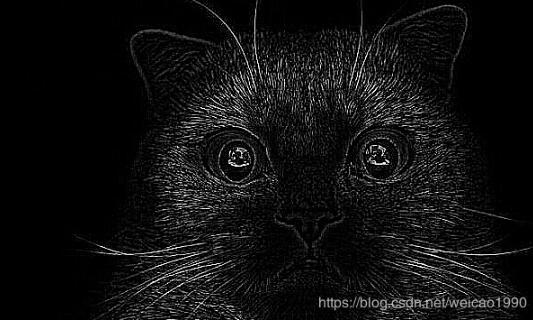
import torch import numpy as np from torch import nn from PIL import Image from torch.autograd import Variable import torch.nn.functional as F def nn_conv2d(im): # 用nn.Conv2d定义卷积操作 conv_op = nn.Conv2d(1, 1, 3, bias=False) # 定义sobel算子参数 sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') # 将sobel算子转换为适配卷积操作的卷积核 sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3)) # 给卷积操作的卷积核赋值 conv_op.weight.data = torch.from_numpy(sobel_kernel) # 对图像进行卷积操作 edge_detect = conv_op(Variable(im)) # 将输出转换为图片格式 edge_detect = edge_detect.squeeze().detach().numpy() return edge_detect def functional_conv2d(im): sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') # sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3)) weight = Variable(torch.from_numpy(sobel_kernel)) edge_detect = F.conv2d(Variable(im), weight) edge_detect = edge_detect.squeeze().detach().numpy() return edge_detect def main(): # 读入一张图片,并转换为灰度图 im = Image.open('./cat.jpg').convert('L') # 将图片数据转换为矩阵 im = np.array(im, dtype='float32') # 将图片矩阵转换为pytorch tensor,并适配卷积输入的要求 im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1]))) # 边缘检测操作 # edge_detect = nn_conv2d(im) edge_detect = functional_conv2d(im) # 将array数据转换为image im = Image.fromarray(edge_detect) # image数据转换为灰度模式 im = im.convert('L') # 保存图片 im.save('edge.jpg', quality=95) if __name__ == "__main__": main()原图片:cat.jpg

结果图片:edge.jpg
以上这篇Pytorch 实现sobel算子的卷积操作详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持python博客。
-
<< 上一篇 下一篇 >>
标签:numpy
Pytorch 实现sobel算子的卷积操作详解
看: 1525次 时间:2020-11-14 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!