关于树莓派四驱小车的运动方向控制、摄像头方向控制已经在前面的两篇博文中介绍过。有需要的可以参考。本文也是基于上述两个python文件就绪的情况进行的。
本文主要讲述我是如何实现通过网页实现小车控制的。当前的实现方式比较简陋,只能支持控制网页和树莓派在同一个局域网中的场景。如果以后还有精力,可能会进行一些改进。
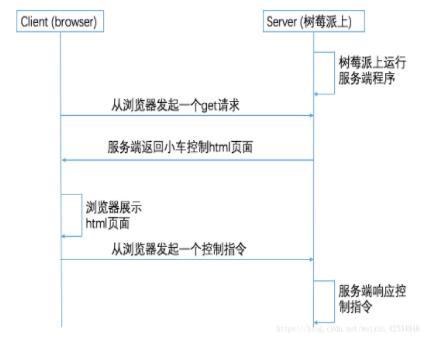
1. 基本思路
2. 服务端控制程序server.py
# --coding:utf-8-- from http.server import BaseHTTPRequestHandler, HTTPServer import time import socket import urllib from car_controler import FourWheelDriveCar from camera_controler import Camera class CarServer(BaseHTTPRequestHandler): carControler = FourWheelDriveCar() cameraControler = Camera() def get_host_ip(self): ''' This method is used for getting local ip address The car server will deploy on this ip ''' try: serverSocket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) serverSocket.connect(("8.8.8.8", 80)) localIP = serverSocket.getsockname()[0] finally: return localIP def do_GET(self): ''' Define the car control GUI for client For the first edition, it will only return direction contol GUI ''' localIP = CarServer.get_host_ip(self) # When this GET method is called, then should init the car self.carControler.reset() # Read control page html file from control.html controlPageFile = open("control.html") controlPageGUI = controlPageFile.read() controlPageFile.close() controlPageGUI = controlPageGUI.replace( "requestAddress", "http://" + localIP + ":9090/") controlPageGUI = controlPageGUI.replace( "cameraAddress", "http://" + localIP + ":8080/") self.send_response(200) self.send_header("Content-type", "text/html") self.end_headers() self.wfile.write(controlPageGUI.encode()) def do_POST(self): length = int(self.headers['Content-Length']) qs = self.rfile.read(length) direction = qs.decode() print(direction) cameraDirection = ['HR', 'HL', 'VU', 'VD', 'RESET'] if direction in cameraDirection: # This is used to control the camera self.cameraControler.cameraRotate(direction) else: # This is used to control the car self.carControler.carMove(direction) self.send_response(200) if __name__ == "__main__": raspCarServer = CarServer hostIP = raspCarServer.get_host_ip(raspCarServer) hostPort = 9090 myServer = HTTPServer((hostIP, hostPort), raspCarServer) print(time.asctime(), "Server Starts - %s:%s" % (hostIP, hostPort)) try: myServer.serve_forever() except KeyboardInterrupt: pass3. 服务端返回的页面control.html
几点说明:
- html文件中有两个地址,我是在server.py中做了替换的,所以client请求之后会有实际的地址给到浏览器,最终都是使用的树莓派的ip
- 有个显示监控视频的区域,可以直接用我给出的示例使用即可,前提是你也用的MJPG-Streamer来获取摄像头监控
- 小车控制我只给来前后左右运动,没有给后退的转向控制,有需要可以自己添加
- 比较重要的是点击按钮之后发送请求到服务端,参考文件