本文实例为大家分享了python opencv进行图像拼接的具体代码,供大家参考,具体内容如下
思路和方法
思路
1、提取要拼接的两张图片的特征点、特征描述符;
2、将两张图片中对应的位置点找到,匹配起来;
3、如果找到了足够多的匹配点,就能将两幅图拼接起来,拼接前,可能需要将第二幅图透视旋转一下,利用找到的关键点,将第二幅图透视旋转到一个与第一幅图相同的可以拼接的角度;
4、进行拼接;
5、进行拼接后的一些处理,让效果看上去更好。
实现方法
1、提取图片的特征点、描述符,可以使用opencv创建一个SIFT对象,SIFT对象使用DoG方法检测关键点,并对每个关键点周围的区域计算特征向量。在实现时,可以使用比SIFT快的SURF方法,使用Hessian算法检测关键点。因为只是进行全景图拼接,在使用SURF时,还可以调节它的参数,减少一些关键点,只获取64维而不是128维的向量等,加快速度。
2、在分别提取好了两张图片的关键点和特征向量以后,可以利用它们进行两张图片的匹配。在拼接图片中,可以使用Knn进行匹配,但是使用FLANN快速匹配库更快,图片拼接,需要用到FLANN的单应性匹配。
3、单应性匹配完之后可以获得透视变换H矩阵,用这个的逆矩阵来对第二幅图片进行透视变换,将其转到和第一张图一样的视角,为下一步拼接做准备。
4、透视变换完的图片,其大小就是最后全景图的大小,它的右边是透视变换以后的图片,左边是黑色没有信息。拼接时可以比较简单地处理,通过numpy数组选择直接把第一张图加到它的左边,覆盖掉重叠部分,得到拼接图片,这样做非常快,但是最后效果不是很好,中间有一条分割痕迹非常明显。使用opencv指南中图像金字塔的代码对拼接好的图片进行处理,整个图片平滑了,中间的缝还是特别突兀。
5、直接拼效果不是很好,可以把第一张图叠在左边,但是对第一张图和它的重叠区做一些加权处理,重叠部分,离左边图近的,左边图的权重就高一些,离右边近的,右边旋转图的权重就高一些,然后两者相加,使得过渡是平滑地,这样看上去效果好一些,速度就比较慢。如果是用SURF来做,时间主要画在平滑处理上而不是特征点提取和匹配。
python_opencv中主要使用的函数
0、基于python 3.7和对应的python-opencv
1、cv2.xfeatures2d.SURF_create ([hessianThreshold[, nOctaves[, nOctaveLayers[, extended[, upright]]]]])
该函数用于生成一个SURF对象,在使用时,为提高速度,可以适当提高hessianThreshold,以减少检测的关键点的数量,可以extended=False,只生成64维的描述符而不是128维,令upright=True,不检测关键点的方向。
2、cv2.SURF.detectAndCompute(image, mask[, descriptors[, useProvidedKeypoints]])
该函数用于计算图片的关键点和描述符,需要对两幅图都进行计算。
3、flann=cv2.FlannBasedMatcher(indexParams,searchParams)
match=flann.knnMatch(descrip1,descrip2,k=2)
flann快速匹配器有两个参数,一个是indexParams,一个是searchParams,都用手册上建议的值就可以。在创建了匹配器得到匹配数组match以后,就可以参考Lowe给出的参数,对匹配进行过滤,过滤掉不好的匹配。其中返回值match包括了两张图的描述符距离distance 、训练图(第二张)的描述符索引trainIdx 、查询的图(第一张)的描述符索引queryIdx 这几个属性。4、M,mask=cv2.findHomography(srcPoints, dstPoints[, method[, ransacReprojThreshold[, mask]]])
这个函数实现单应性匹配,返回的M是一个矩阵,即对关键点srcPoints做M变换能变到dstPoints的位置。5、warpImg=cv2.warpPerspective(src,np.linalg.inv(M),dsize[,dst[,flags[,borderMode[,borderValue]]]])
用这个函数进行透视变换,变换视角。src是要变换的图片,np.linalg.inv(M)是④中M的逆矩阵,得到方向一致的图片。6、a=b.copy() 实现深度复制,Python中默认是按引用复制,a=b是a指向b的内存。
7、draw_params = dict(matchColor = (0,255,0),singlePointColor = (255,0,0),matchesMask = matchMask,flags = 2),img3 = cv2.drawMatches(img1,kp1,img2,kp2,good,None,**draw_params)
使用drawMatches可以画出匹配的好的关键点,matchMask是比较好的匹配点,之间用绿色线连接起来。核心代码
import cv2 import numpy as np from matplotlib import pyplot as plt import time MIN = 10 starttime=time.time() img1 = cv2.imread('1.jpg') #query img2 = cv2.imread('2.jpg') #train #img1gray=cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY) #img2gray=cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY) surf=cv2.xfeatures2d.SURF_create(10000,nOctaves=4,extended=False,upright=True) #surf=cv2.xfeatures2d.SIFT_create()#可以改为SIFT kp1,descrip1=surf.detectAndCompute(img1,None) kp2,descrip2=surf.detectAndCompute(img2,None) FLANN_INDEX_KDTREE = 0 indexParams = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5) searchParams = dict(checks=50) flann=cv2.FlannBasedMatcher(indexParams,searchParams) match=flann.knnMatch(descrip1,descrip2,k=2) good=[] for i,(m,n) in enumerate(match): if(m.distance<0.75*n.distance): good.append(m) if len(good)>MIN: src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2) ano_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2) M,mask=cv2.findHomography(src_pts,ano_pts,cv2.RANSAC,5.0) warpImg = cv2.warpPerspective(img2, np.linalg.inv(M), (img1.shape[1]+img2.shape[1], img2.shape[0])) direct=warpImg.copy() direct[0:img1.shape[0], 0:img1.shape[1]] =img1 simple=time.time() #cv2.namedWindow("Result", cv2.WINDOW_NORMAL) #cv2.imshow("Result",warpImg) rows,cols=img1.shape[:2] for col in range(0,cols): if img1[:, col].any() and warpImg[:, col].any():#开始重叠的最左端 left = col break for col in range(cols-1, 0, -1): if img1[:, col].any() and warpImg[:, col].any():#重叠的最右一列 right = col break res = np.zeros([rows, cols, 3], np.uint8) for row in range(0, rows): for col in range(0, cols): if not img1[row, col].any():#如果没有原图,用旋转的填充 res[row, col] = warpImg[row, col] elif not warpImg[row, col].any(): res[row, col] = img1[row, col] else: srcImgLen = float(abs(col - left)) testImgLen = float(abs(col - right)) alpha = srcImgLen / (srcImgLen + testImgLen) res[row, col] = np.clip(img1[row, col] * (1-alpha) + warpImg[row, col] * alpha, 0, 255) warpImg[0:img1.shape[0], 0:img1.shape[1]]=res final=time.time() img3=cv2.cvtColor(direct,cv2.COLOR_BGR2RGB) plt.imshow(img3,),plt.show() img4=cv2.cvtColor(warpImg,cv2.COLOR_BGR2RGB) plt.imshow(img4,),plt.show() print("simple stich cost %f"%(simple-starttime)) print("\ntotal cost %f"%(final-starttime)) cv2.imwrite("simplepanorma.png",direct) cv2.imwrite("bestpanorma.png",warpImg) else: print("not enough matches!")运行结果
原图1.jpg

原图2.jpg

特征点匹配

直接拼接和平滑对比
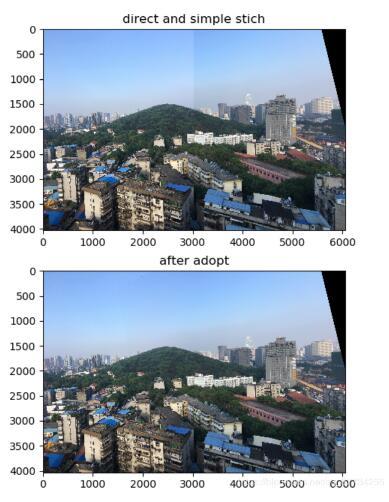
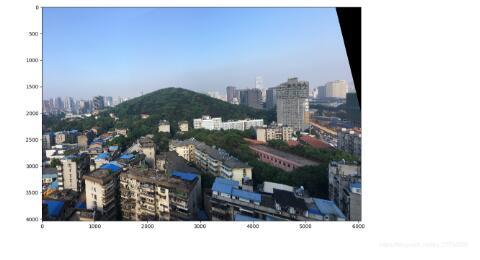
效果
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持python博客。
-
<< 上一篇 下一篇 >>
标签:numpy matplotlib
python opencv进行图像拼接
看: 1658次 时间:2020-08-16 分类 : python教程
- 相关文章
- 2021-12-20Python 实现图片色彩转换案例
- 2021-12-20python初学定义函数
- 2021-12-20图文详解Python如何导入自己编写的py文件
- 2021-12-20python二分法查找实例代码
- 2021-12-20Pyinstaller打包工具的使用以及避坑
- 2021-12-20Facebook开源一站式服务python时序利器Kats详解
- 2021-12-20pyCaret效率倍增开源低代码的python机器学习工具
- 2021-12-20python机器学习使数据更鲜活的可视化工具Pandas_Alive
- 2021-12-20python读写文件with open的介绍
- 2021-12-20Python生成任意波形并存为txt的实现
-
搜索
-
-
推荐资源
-
Powered By python教程网 鲁ICP备18013710号
python博客 - 小白学python最友好的网站!